2018年7月26日下午,机电学院进行了2017级机械类本科生创新设计比赛结题答辩。创新设计比赛从机械类大一新生入学即开始立项,每3-5名同学组成一支队伍,并由助理教授以上的导师进行专业指导。各队伍自由选择自己喜欢的创新设计题目,在导师指导下经过为期一年的设计、制造和调试,最终于2018年夏季学期末完成了设计目标,并在结题答辩上展示各自的成果。经过评选,参与创新设计比赛的22支队伍中共评出特等奖2项、一等奖5项、二等奖及三等奖若干。
获得特等奖和一等奖的优秀作品将在我们的公众号上做专题展示,第一期带来的是获得特等奖的项目——遥控太阳能充电小车,团队成员为毛云瑄、王圣达、陈昕,指导老师为徐心海副教授。
在当今化石能源不断消耗面临枯竭危机的背景下,对于替代能源和可再生能源的研究成为热点。太阳能取之不尽用之不竭,可以说是一个很好的替代能源方案。中国虽然是太阳能电池生产大国,但对其使用和开发其实很有限,更不用说把他用在车上了。综合以上原因,(以及为了创新的一个学分),我们小组此次项目对太阳能电动汽车进行了设计探索。
在设计的最初,我们把研究分为三个方向进行:外形设计、底盘设计、和动力系统。经过一段时间的探索,我们发现整个汽车的设计可能离我们还很远,于是改换成对模型车的设计,研究方向也随之改变成控制系统、结构设计、动力系统。
陈昕同学负责的是控制系统的开发,他介绍到:“刚开始做项目时,我对控制完全没概念,也没有编程经验。在同学的推荐下接触了树莓派。树莓派可以用Python编程,而Python又对新人比较友好,买的参考书中又刚好有相关内容,就决定使用它了。但树莓派使用起来可不简单。基于Linux的它,做任何事都离不开命令行。开机、设置、安装程序等工作,远比想象的艰难,经常遇到失败。不断的上网查阅、使用不同的方法进行尝试,才初步实现了对树莓派的控制。
接下来,就要用树莓派实现电机的控制。通过上网调查,明确了大致过程。但电机驱动模块对我又是一个完全陌生的东西。店家给的资料中,电路图完全看不懂,针脚怎么对应连接,都是问题。看的多了,用的多了,加上尝试和试验,终于实现了电机的控制。
由于我们使用的是买来的遥控车作为基础,所以希望尽量保留原来的机械结构。但原来的转向机构十分奇特,我们当时只知道舵机可以转向,但舵机只用三线,可它用了五线。于是迟迟无法下手。突然,有一天,一位组员在逛淘宝时,看到了五线步进电机。原来步进电机也可以实现角位移输出。于是,我们拆拆补补,将原来的电机拆下,通过3D打印,将自己的步进电机换上,终于实现了转向。“
最终成型的控制系统采用的方法是通过控制程序和树莓派控制驱动模块,再由驱动模块驱动电机实现小车的启动停止、前进后退、向左向右、螺旋升天(划掉),下面是控制程序简单的关系图:
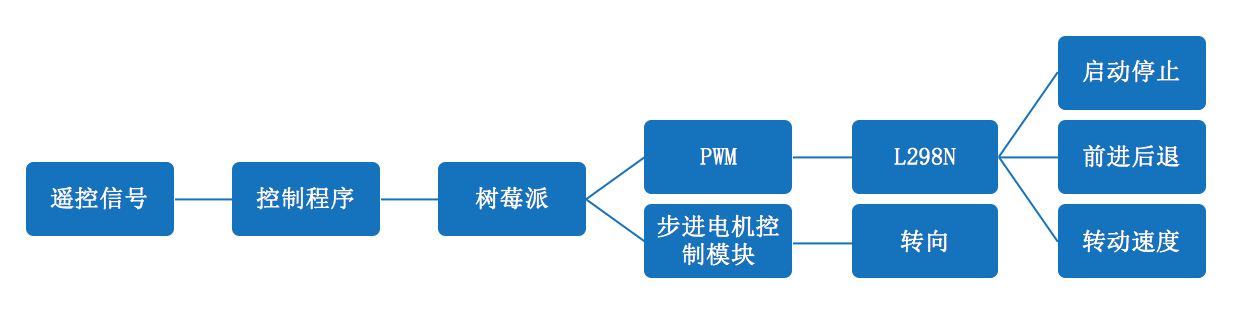
其中L298N是直流电机的驱动模块,接收控制信号后给直流电机不同的电平控制其转动过程从而达到改变转速和转动方向。步进电机驱动模块的作用也是类似的。
王圣达同学负责小车的动力系统,在采访中他介绍到:“我们组一开始把动力系统当做最重要的部分,因为做的是太阳能车。我是负责这一块内容的,刚开始就去图书馆找太阳能有关的书籍,找到的都是怎么做太阳能电池板这一类的。我就想从基础开始吧,就读了一会书,后来就没有后来了,快到了中期答辩才想起有这么一回事。在之前我们已经有一个车子了,因此太阳能板的尺寸要考虑一下车的大小。在中期答辩前我们开始选购很多东西:电池、电机、太阳能板、控制板等等。很多东西在市面上买到的都是一定规格的,一定要多少电压,功率不能超过多少,我们自己的能力在那个时候也体现出来实在太有限了,这些东西都是我们没办法自己做的,所以只能根据已经有的东西来搭配。对电池管理系统方面的问题,这是个目前比较棘手的问题,首先不能直接太阳能板对电池充电,很不稳定,太阳能板驱动电机也有点困难,要考虑把这三个东西合在一起又不影响,我们一开始选用稳压恒流模块,但是充放电同时进行的问题还没解决,最后听从导师的建议不如加个开关吧,就成了最后的样子。虽然最后选择的稳压恒流模块对电池是比较友好了,但是把本来就低的太阳能功率降得更低了,充电时间延长了很多,之后我们会再自己学习这一方面的内容,自己做这个模块,并且还要再加一个旁路二极管来防止倒冲。对太阳能板的动力不足这个问题我们也想过小车后面拖一个拖车上面放一个很大的太阳能板,可是因为这种方案在以后的设计中可能无法实现,所以还是选择常规车型加装太阳能板的方法。”
动力系统方面最后选用四节18650的锂离子电池、18V5W的太阳能板和7.4V的390电机。太阳能板和电机是根据和电池间的相互需要进行选择的,电池管理方面由于能力有限,所以暂时换成了开关,控制充电和放电分开进行。同时由于太阳能输出不稳定,所以在太阳能板和电池间有稳压恒流模块对充电进行管理。出于对电机保护的考虑,在电机和电池间装有保护板。以下是动力系统选择的流程图:

毛云瑄同学负责的是电机选择和结构设计,他介绍说:“由于技术有限,我们只能提供直流电源,所以在做电机选择的时候,我只考虑了直流电机。直流电机分为有刷和无刷两种,有刷电机带有传统的电刷,在驱动的时候会有较多的能量损耗,同时需要做一些清理(这种小电机几乎排除清理的可能性);而无刷电机则克服了电刷的诸多问题,其采用了电动控制模块取代电刷,不过由于加入电控,成本也相对较高。但是对于模型车来讲,无刷电机和有刷电机的差别也就仅限于最高速度。在预算有限的情况下,我们选择了有刷电机。
至于蜂窝设计,其实是一个很偶然的设计。最初的设计原型如下图,后来由于尺寸较大,3D打印费用高昂,我们决定自己买亚克力板进行切除。买来了亚克力板我们发现要使用电锯等很危险的工具,那时正赶上认知实习,正在设计遇到瓶颈的时候,我们去了东方红卫星中心,发现了卫星的蜂窝夹层设计。于是我们突发奇想,把太阳能板架也设计成了蜂窝结构,这样既减少了质量,又加强了散热。感谢认知实习。“
结构设计方面又分为三个部分传动系统、底盘结构和车身结构。车身结构主要考虑了芯片和电池的放置,以及与底盘的装配。以下是设计图纸和3D图:
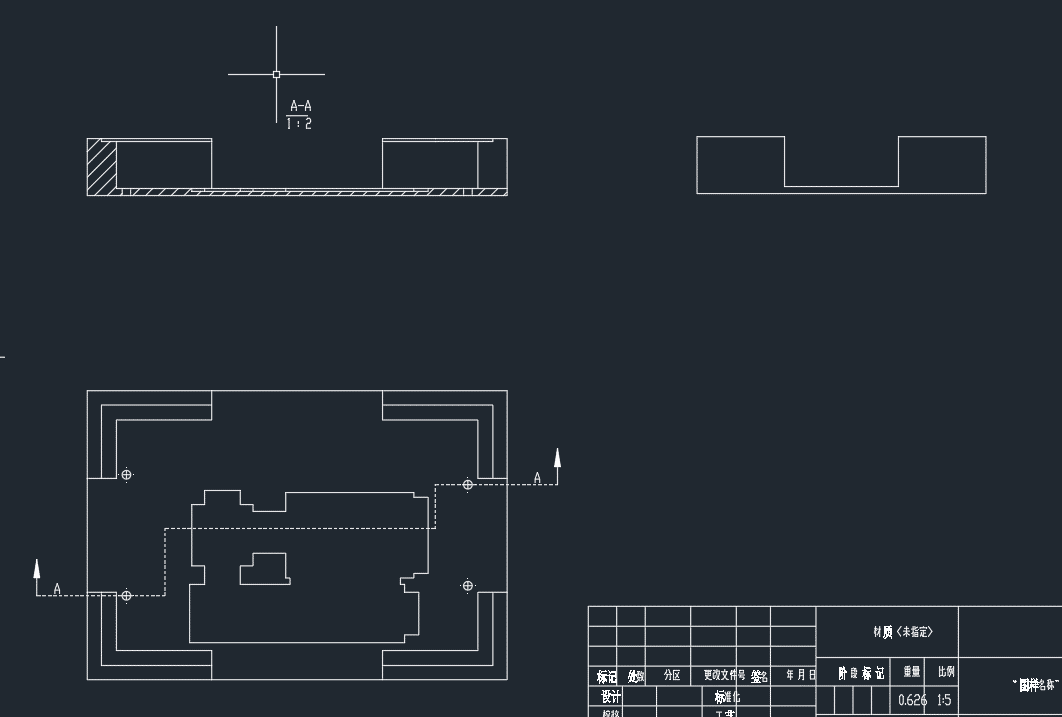
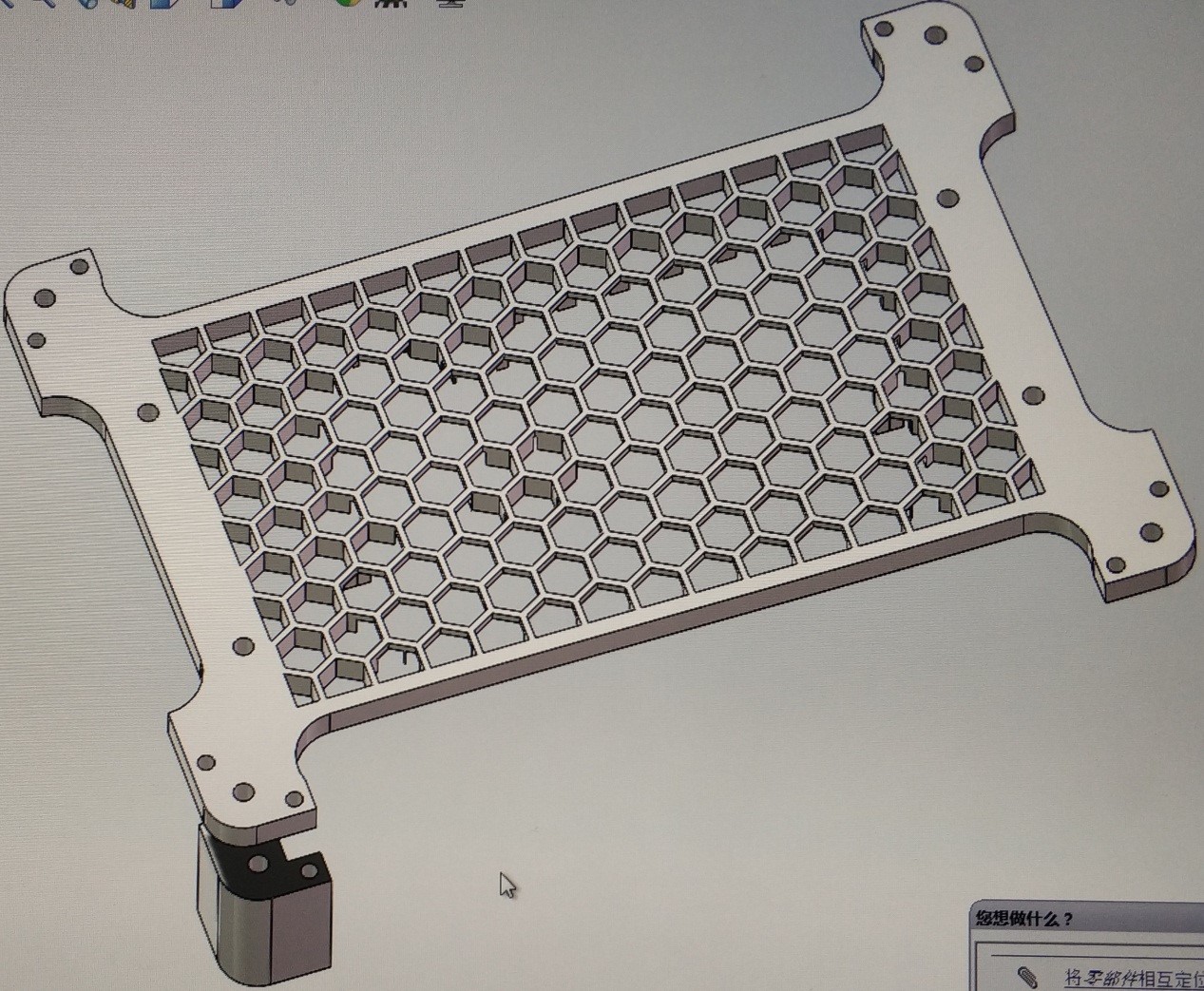
由图纸变成3D图有许多改变,最大的改变就是变成了蜂窝结构。这是出于芯片散热的考虑,整个架子载重不是很多,还有就是3D打印实在是太贵了。所以就变成了现在这个样子。
经过两个学期的努力和学习,我们小组终于在结题时交出了较为满意的答复。十分感谢一年来各个学员的努力和配合,还有导师对我们的悉心指导,和学校给我们这个能够学习和展示自我的机会。
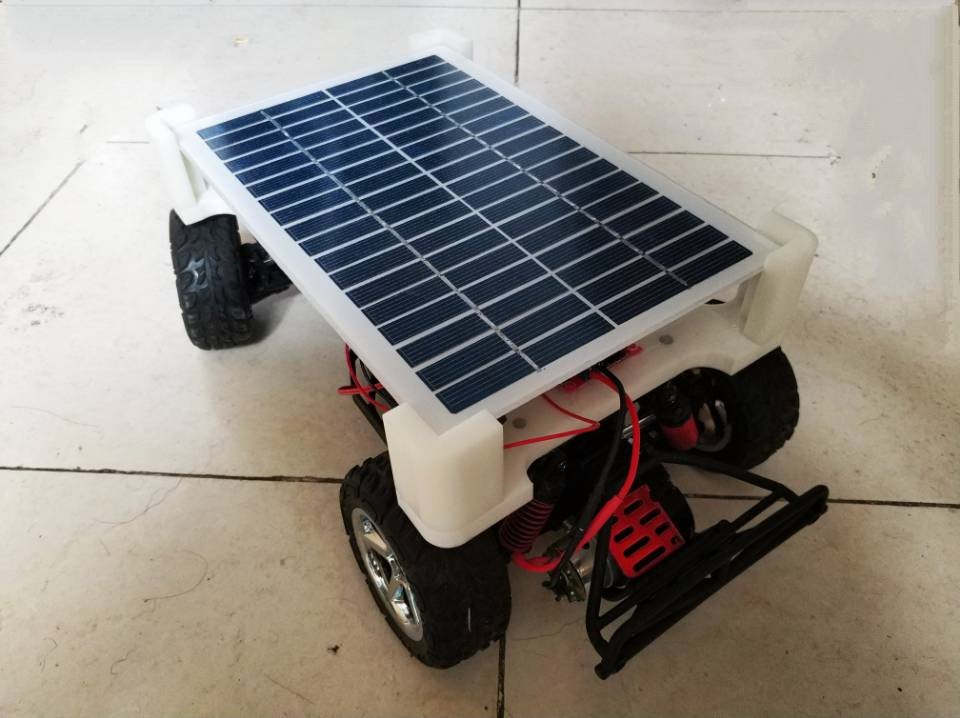
最终的成果是一个用太阳能板充电的太阳能遥控车,下面是它的美照和组员介绍:


陈昕,性别男,机电学院17机械系,研究方向:控制系统。

毛云瑄,性别男,机电学院17机械系,研究方向:结构设计。
王圣达,性别男,机电学院17机械系,研究方向:动力系统。 (审核 陈南坤)

